
產(chǎn)品簡(jiǎn)介PRODUCT DESCRIPTION
水下移動(dòng)機(jī)器人教學(xué)科研平臺(tái)
聯(lián)系電話:13720126958 / 13387619634產(chǎn)品特色
PRODUCT FEATURES
EDUROV可用于高校工程訓(xùn)練、機(jī)器人創(chuàng)新實(shí)驗(yàn)室、控制算法實(shí)現(xiàn)、視覺(jué)算法實(shí)現(xiàn)等多種教育研發(fā)領(lǐng)域,備有適合不同領(lǐng)域和層次用戶使用的課程教案和實(shí)驗(yàn)指導(dǎo)書(shū)。面向應(yīng)用,強(qiáng)調(diào)高校教育和研究。
EDUROV的傳感器模塊、控制計(jì)算機(jī)、電源、推進(jìn)器、執(zhí)行器等均有適應(yīng)不同應(yīng)用領(lǐng)域的配置可互換。無(wú)論是著重于視覺(jué)方面的圖像算法研究,還是聚焦于運(yùn)動(dòng)的控制算法研究,總會(huì)有滿足需求的執(zhí)行器、傳感器配置。
EDUROV配備有完整的基于ROS平臺(tái)的軟件包。集成了包括機(jī)器人行為規(guī)劃、導(dǎo)航、視覺(jué)、自主策略的完全開(kāi)放軟件平臺(tái)。同時(shí),基于開(kāi)放性,擴(kuò)展性的原則,用戶可以親自對(duì)軟件包進(jìn)行調(diào)試與開(kāi)發(fā),我們將提供完整的開(kāi)發(fā)手冊(cè)。
為了方便上手和教學(xué)需要,EDUROV還提供一整套仿真軟件。在實(shí)際接觸實(shí)物機(jī)器人前,對(duì)整體實(shí)驗(yàn)、機(jī)器人結(jié)構(gòu)進(jìn)行熟悉,以提高實(shí)驗(yàn)成功率和效果。仿真平臺(tái)可提供的實(shí)驗(yàn)包括模型搭建、機(jī)器人本體自穩(wěn)控制、路徑規(guī)劃等。
硬件組成
HARDWARE COMPOSITION
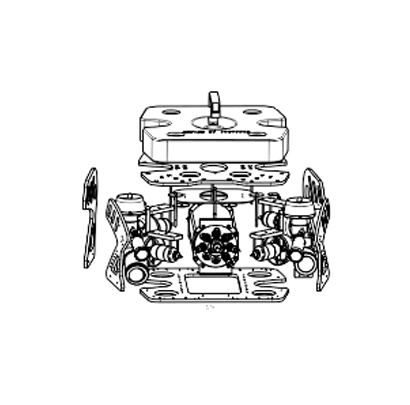
本項(xiàng)目所研制的教學(xué)版水下機(jī)器人分為水面系統(tǒng)和水下系統(tǒng)兩部分。水面系統(tǒng)負(fù)責(zé)圖像顯示,人機(jī)交互界面顯示,與水下系統(tǒng)、遙控器的通信。水下系統(tǒng)負(fù)責(zé)機(jī)器人運(yùn)動(dòng)控制,機(jī)械手操作控制,環(huán)境與運(yùn)行狀態(tài)數(shù)據(jù)采集,攝像頭與聲納圖像采集,與上位機(jī)通信。

圖2 教學(xué)版水下機(jī)器人總體結(jié)構(gòu)圖
系統(tǒng)結(jié)構(gòu)圖如下所示:

圖2 教學(xué)版水下機(jī)器人系統(tǒng)結(jié)構(gòu)圖
- 載體結(jié)構(gòu)
水下系統(tǒng)采用框架式機(jī)械結(jié)構(gòu),推進(jìn)器和浮力材固定在框架上,電子設(shè)備和攝像頭封裝在一個(gè)電子艙內(nèi),機(jī)械手和水聲通信機(jī)固定在框架和浮力材上,通過(guò)水密接插件與水下電子艙相連。
- 通信系統(tǒng)
水下機(jī)器人水面與水下通信包括:水聲通信和臍帶通信。
(1)水聲通信機(jī)要求: 通信接口:串口; 供電電壓:16V。 (2)臍帶通信可提供系統(tǒng)水面與水下的有線網(wǎng)絡(luò)連接。
- 航行控制系統(tǒng)
航行控制計(jì)算機(jī)完成水下機(jī)器人的運(yùn)動(dòng)控制與應(yīng)急,運(yùn)動(dòng)控制分為兩種模式,一種為水面遙控模式,此時(shí)水下機(jī)器人可通過(guò)水下控制計(jì)算機(jī)和遙控手柄操控水下載體上的推進(jìn)器和其他設(shè)備。另一種是自主模式,在自主模式下,水下機(jī)器人可完成定向航行和定深航行。自主航行參數(shù)包括航向角設(shè)定值,航行深度設(shè)定值、航行時(shí)間等。
- 能源系統(tǒng)
水下機(jī)器人采用鋰電池供電,容量為:240wh,平臺(tái)電壓:12V。
- 水面控制
水面控制臺(tái)包括水面控制計(jì)算機(jī)、水面網(wǎng)絡(luò)通信設(shè)備,水面供電設(shè)備等。具體參考界面如下:

軟件特點(diǎn)
SOFTWARE FEATURES
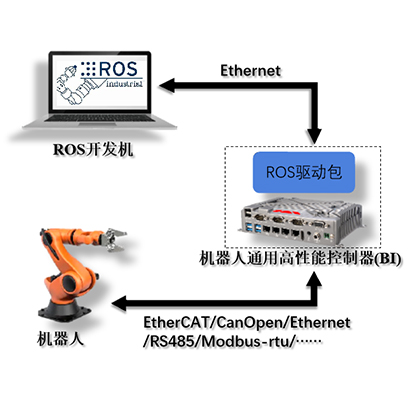
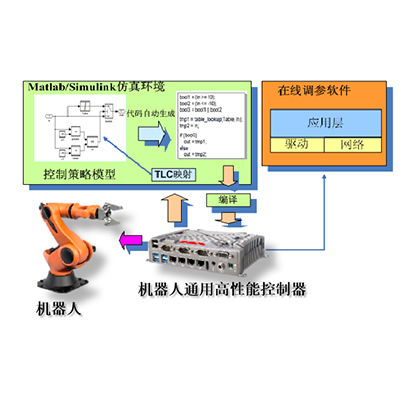
(1)基于ROS平臺(tái)開(kāi)發(fā)的軟件
ROS(Robot Operating System)是一個(gè)機(jī)器人軟件平臺(tái),它能為異質(zhì)計(jì)算機(jī)集群提供類似操作系統(tǒng)的功能。它提供一些標(biāo)準(zhǔn)操作系統(tǒng)服務(wù),例如硬件抽象,底層設(shè)備控制,常用功能實(shí)現(xiàn),進(jìn)程間消息以及數(shù)據(jù)包管理。
ROS控制框架如圖二所示。

圖二 ROS控制框架
以這種框架設(shè)計(jì)的軟件有其下特點(diǎn):
1)所有包通過(guò)上位機(jī)進(jìn)行調(diào)用實(shí)現(xiàn)人機(jī)交互,ROS下可以直接創(chuàng)建Qt界面包。
2)串口數(shù)據(jù)模塊根據(jù)固定的格式和串口通信達(dá)到和ROV交互信息的功能。
3)由解析接收的串口數(shù)據(jù)可以得到ROV的當(dāng)前姿態(tài)信息、加速度信息等,由解析發(fā)出的信息可對(duì)ROV發(fā)送控制信號(hào)。
4)實(shí)現(xiàn)子功能只需編寫(xiě)對(duì)應(yīng)的APP包實(shí)現(xiàn),達(dá)到解耦合的效果,每個(gè)程序間相對(duì)獨(dú)立
5)組合調(diào)用子功能可以實(shí)現(xiàn)相應(yīng)的高級(jí)功能,可以將高級(jí)功能命令編寫(xiě)成腳本
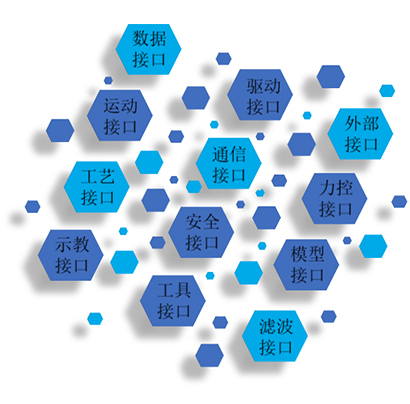
其功能模塊包括:
1. 運(yùn)動(dòng)控制功能模塊
2. 傳感器感知功能模塊
3. 仿真功能模塊
包括的子模塊詳細(xì)框圖見(jiàn)圖四。

圖四EDUROV功能模塊
(2)水下圖像處理算法
水下機(jī)器人主要的環(huán)境感知手段是圖像,但是由于水體會(huì)對(duì)水下圖像產(chǎn)生嚴(yán)重的弱化現(xiàn)象,且一些水下物體存在著可變形的特點(diǎn),從而嚴(yán)重影響水下機(jī)器人檢測(cè)識(shí)別能力。 因此本產(chǎn)品提供基于EDUROV視覺(jué)成像系統(tǒng)的水下圖像處理算法實(shí)現(xiàn)平臺(tái)。EDUROV將攝像頭采集到的圖像數(shù)據(jù)傳到上位機(jī),上位機(jī)運(yùn)行水下圖像處理算法對(duì)采集到的圖像進(jìn)行圖像增強(qiáng)、目標(biāo)定位等功能實(shí)現(xiàn)。 本產(chǎn)品提供軟件接口給用戶直接對(duì)圖像進(jìn)行處理。用戶可以根據(jù)自己需要進(jìn)行開(kāi)發(fā)和修改。
(3)全套仿真軟件
EDUROV-simulator是與EDUROV配套的,專門(mén)用于ROV的一套開(kāi)發(fā)和仿真系統(tǒng)。它包含一個(gè)計(jì)算機(jī)軟件包,使用不同工作模式對(duì)ROV進(jìn)行仿真。通過(guò)Gazebo軟件可以非常直觀的看到自己親手設(shè)計(jì)的ROV與周邊環(huán)境交互。同時(shí),通過(guò)Rviz軟件可以非常細(xì)節(jié)的看到ROV運(yùn)動(dòng)姿態(tài)、仿真參數(shù),便于用戶接下來(lái)的分析和改進(jìn)。ROV在水底仿真示意圖如圖五。

圖五仿真軟件中ROV在海底展示
Rviz細(xì)節(jié)觀察參數(shù)界面如圖六所示。

圖六Rviz中界面與軌跡規(guī)劃展示
界面介紹如下:
1)ROV狀態(tài)監(jiān)控欄
這部分展示了ROV所處的運(yùn)行狀態(tài)。包括俯仰角,參考點(diǎn)距離,參考點(diǎn)等信息。
2)Rviz仿真狀態(tài)欄
展示仿真運(yùn)行時(shí)的節(jié)點(diǎn)、模型、tf等。
3)ROV攝像頭成像仿真
仿真中模擬的攝像頭成像。圖像為之前建的seabed河床圖。
4)ROV仿真主畫(huà)面
展示ROV與海底背景的主畫(huà)面。紫色為預(yù)先設(shè)定的軌跡。只要載入預(yù)編的.yaml文件,向節(jié)點(diǎn)輸入目標(biāo)點(diǎn)、速度即可使ROV沿著設(shè)定路徑前進(jìn)。為后面做路徑規(guī)劃做基礎(chǔ)。
5)仿真時(shí)間信息
仿真軟件包括的功能有:
搭建屬于自己的水下ROV模型
通過(guò)點(diǎn)云等源文件構(gòu)建海底模型
ROV水下姿態(tài)控制
ROV水下路徑規(guī)劃
干擾下的ROV控制
4)機(jī)器學(xué)習(xí)框架
為了滿足日益增長(zhǎng)的機(jī)器學(xué)習(xí)需要,本產(chǎn)品在上位機(jī)提供機(jī)器學(xué)習(xí)框架。
研究項(xiàng)目
RESEARCH PROJECT
(1)水下機(jī)器人傳感與感知技術(shù)
傳感器主要包括:聲吶、電子羅盤(pán)、陀螺儀、GPS、攝像頭、深度傳感器等多種傳感器。可完成的實(shí)驗(yàn)研究包括:
基于聲吶的環(huán)境建模
基于GPS和電子羅盤(pán)的機(jī)器人區(qū)域?qū)Ш蕉ㄎ谎芯?/span>
基于深度傳感器的定高定深控制研究
基于水下攝像頭的視覺(jué)獲取(2)智能系統(tǒng)及其控制算法
本產(chǎn)品配有四個(gè)水下推進(jìn)器,使用通過(guò)電子調(diào)速器控制其推力。基于EDUROV的水下機(jī)器人平臺(tái),可以在真正的水下平臺(tái)上研究動(dòng)態(tài)復(fù)雜環(huán)境下水下機(jī)器人的控制。同時(shí)結(jié)合視覺(jué)、陀螺儀、深度傳感器等傳感器信息,可精確控制水下機(jī)器人的運(yùn)動(dòng)。結(jié)合仿真軟件,可以完成理論à仿真à實(shí)驗(yàn)驗(yàn)證的研究流程,進(jìn)行相關(guān)算法的驗(yàn)證,可開(kāi)展的研究領(lǐng)域包括:
基于PID控制的機(jī)器人運(yùn)動(dòng)控制研究
水下機(jī)器人的動(dòng)力學(xué)、運(yùn)動(dòng)學(xué)建模
機(jī)器人系統(tǒng)中的嵌入式控制器研究(基于stm32處理器)
基于遺傳算法的水下機(jī)器人智能控制和路徑規(guī)劃研究
(3)機(jī)器視覺(jué)技術(shù)
水下視覺(jué)對(duì)于水下機(jī)器人作業(yè)非常重要。EDUROV包括標(biāo)準(zhǔn)配置的單目攝像頭以及可選配的雙目立體視覺(jué)攝像頭,可開(kāi)展與計(jì)算機(jī)視覺(jué)相關(guān)的研究有:
水下圖像傳輸與解碼
基于機(jī)器視覺(jué)的視覺(jué)導(dǎo)航系統(tǒng)研究
圖像特征與模板匹配技術(shù)研究
基于視覺(jué)的三維環(huán)境重建研究
視覺(jué)伺服技術(shù)機(jī)器控制系統(tǒng)研究
(4)水下機(jī)器人仿真
仿真軟件可以在接觸實(shí)物前提前了解算法和硬件模型,做到心中有數(shù),大大降低了教學(xué)研究的上手難度,同時(shí)也提高了學(xué)習(xí)的有效率。本產(chǎn)品提供的仿真功能有:
真實(shí)六自由度仿真
允許用戶指定載體組件位置和性能
加入環(huán)境影響因素,包括抄襲和海況
模擬輸入和輸出
數(shù)據(jù)記錄和回放
路徑規(guī)劃
羽流模擬





客戶服務(wù)電話:
027-87018711
 掃描二維碼關(guān)注我們
掃描二維碼關(guān)注我們
聯(lián)系電話:李經(jīng)理 13720126958 陳經(jīng)理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術(shù)開(kāi)發(fā)區(qū)關(guān)東街道湯遜湖北路36號(hào)武漢理工大科技園新能源研發(fā)基地2棟08層801
版權(quán)所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號(hào)-1