

開放式桌面機器人綜合科教平臺
聯(lián)系電話:13720126958 / 13387619634該平臺是以六自由度機械臂為被控對象的教學實驗系統(tǒng),主要包括六軸機械臂、開放式控制系統(tǒng)、末端操作工具、開發(fā)pc機,能夠向?qū)W生提供完整的機器人教學實驗環(huán)境,包括機器人系統(tǒng)認識、DH建模、正逆運動學、關(guān)節(jié)空間規(guī)劃、笛卡爾空間規(guī)劃、雅克比矩陣、動力學等實驗課程。
另外該平臺還包含PLC總控單元、機器視覺系統(tǒng)、供料輸送單元、輔助電器元件及用于檢測、搬運、碼垛、裝配使用的功能模塊。其中,PLC控制系統(tǒng)可用于控制機器人和機器視覺檢測系統(tǒng)的運作,使整個系統(tǒng)更加智能化和高效,其使用先進的控制程序,實現(xiàn)復雜的運動控制和自動化任務,同時提高模擬生產(chǎn)效率。機器視覺檢測系統(tǒng)可以實現(xiàn)對配套的工件道具進行視覺識別、檢測、定位,提高檢測的精度和速度。電控輸送系統(tǒng)可以實現(xiàn)工件的自動上料和在皮帶線上不同位置之間的運輸,傳送帶配備了編碼器,配合機器人一起使用可對物料完成空間動態(tài)跟隨和抓取,提高物料的運輸效率和準確性。此外,我們的實訓系統(tǒng)還標配多款快換工具板,通過自由組合實訓平臺可以實現(xiàn)對物品的檢測、標定、循跡、抓取、碼垛、裝配等工藝應用。
平臺特點
1、Matlab/Simulink下建立的動態(tài)系統(tǒng)數(shù)學模型應用于實時仿真、算法測試,便于全流程控制和局部算法驗證。
2、高度集成的機器人編譯環(huán)境保證了模型的可靠性、準確度及更小的仿真步長,提高了模型運算速度和控制精度。
3、涵蓋機器人基礎(chǔ)理論和高級控制算法庫,集成多種總線通訊模塊,建立運動學、動力學模型,兼具視覺、力覺等處理能力。
4、提供多層次開發(fā)接口,針對開發(fā)的深度不同,滿足不同層次的開發(fā)需求,深度開放,滿足定制化開發(fā)。
5、既能滿足機器人學相關(guān)原理及底層控制實驗,又可實現(xiàn)機器人系統(tǒng)標定、軌跡循跡,通訊控制等教學項目,結(jié)合標配的模型工件,能完成跟隨、抓取、檢測、搬運、碼垛、精密裝配等任務。
核心單元
1.六軸機械臂

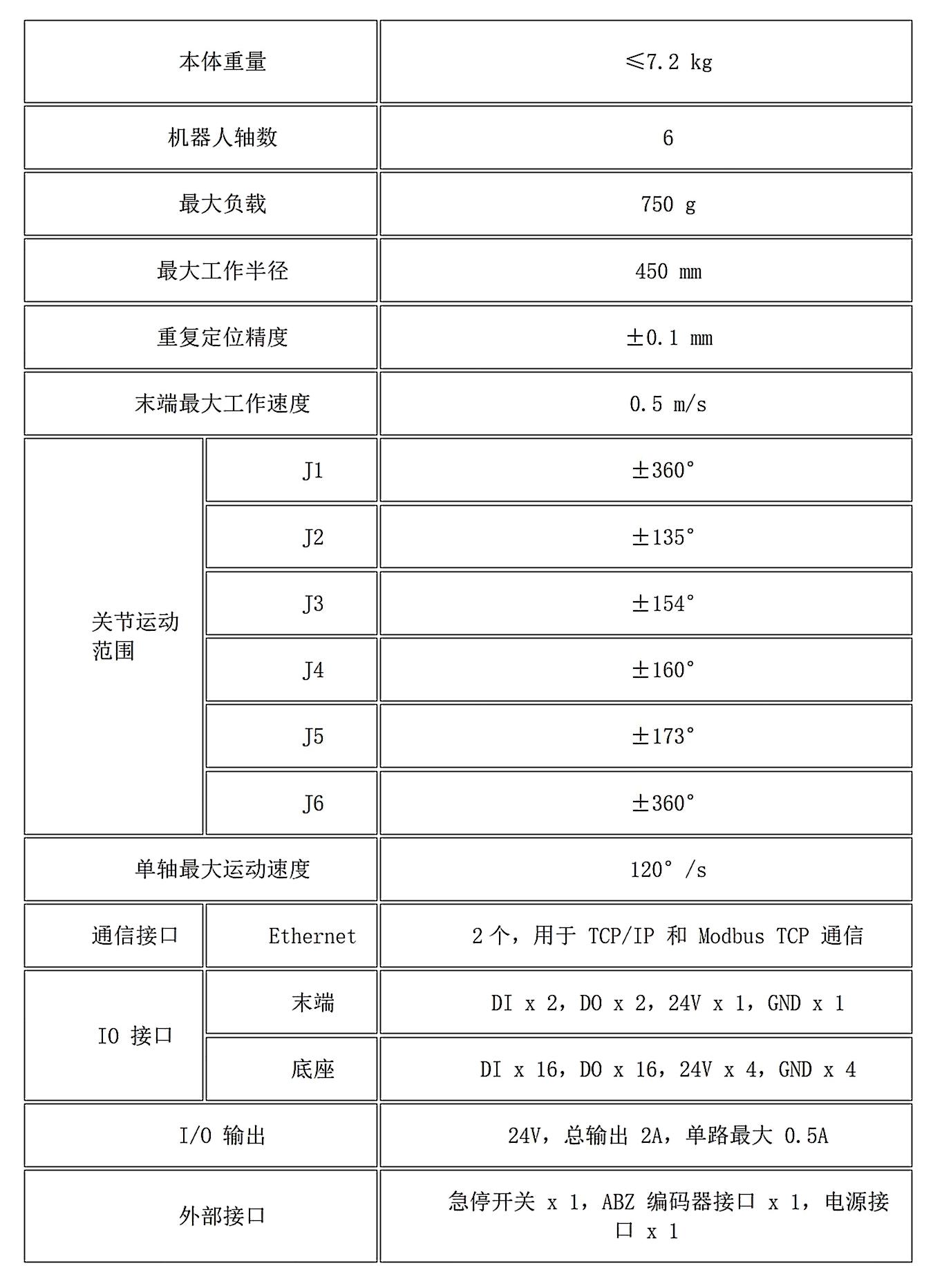
產(chǎn)品特點:
1、安全性高:流線型機身設計結(jié)合碰撞檢測功能,操作更安全,搭配圓環(huán)指示燈,實時掌握機器人的運行狀況,有效降低用戶碰撞風險。
2、簡單安裝:機身小巧,重量輕,擺放在桌面上即可啟動安裝,簡單靈活,機器人與控制器一體化設計,免去了復雜的連線,插電即用。
3、快速上手:基于自研的軌跡復現(xiàn)技術(shù),通過拖動示教,輕松完成軌跡錄制,支持圖形化編程,零基礎(chǔ)快速上手,簡單易用,人人可操作。
4、靈活拓展:支持 ROS, Matlab、Labview、C++ 等控制方式,豐富的開發(fā)接口支持二次開發(fā),適配吸盤、夾爪、滑軌等工業(yè)級生態(tài)組件,應用場景靈活擴展。
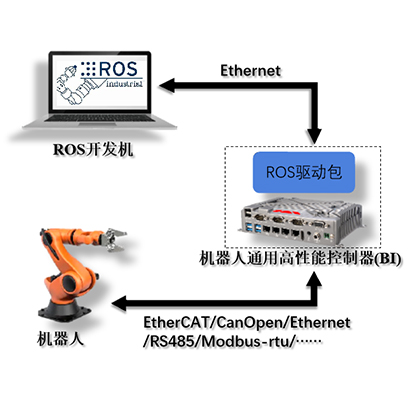
2.開放式控制系統(tǒng)

開放式控制系統(tǒng)可以實現(xiàn)多種構(gòu)型機器人控制。支持用戶快速搭建機器人研究或應用平臺,支持機器人控制算法驗證及機器人應用的快速開發(fā)。
特征優(yōu)勢:
l 統(tǒng)一的操作接口、僅需要簡單的配置即可實現(xiàn)快速適配;
l 支持多機器人協(xié)同作業(yè);
l 運動控制支持CIA402協(xié)議,支持通用構(gòu)型的運動控制;
l 安全模塊包括支持分布式時鐘、支持冗余、支持熱插拔和支持運動狀態(tài)檢測等。
機器人模型庫:
l 機器人單軸控制庫
l 機器人接口庫
l 機器人基礎(chǔ)控制庫
l 機器人3D顯示庫
l 傳感器接口庫
l 末端執(zhí)行器接口庫

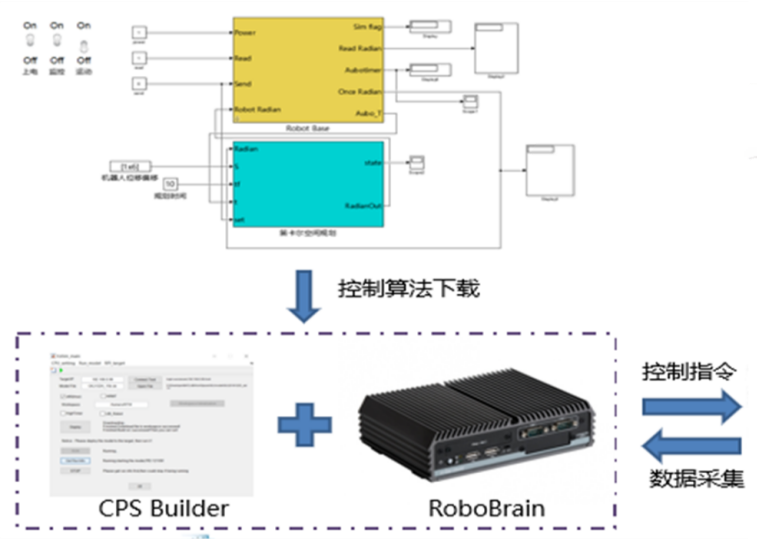
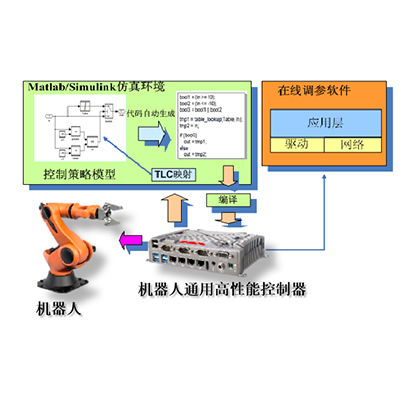
機器人軟件開發(fā)工具:
機器人應用開發(fā)工具(CPS Builder)實現(xiàn)機器人控制系統(tǒng)的模型搭建,快速仿真測試。

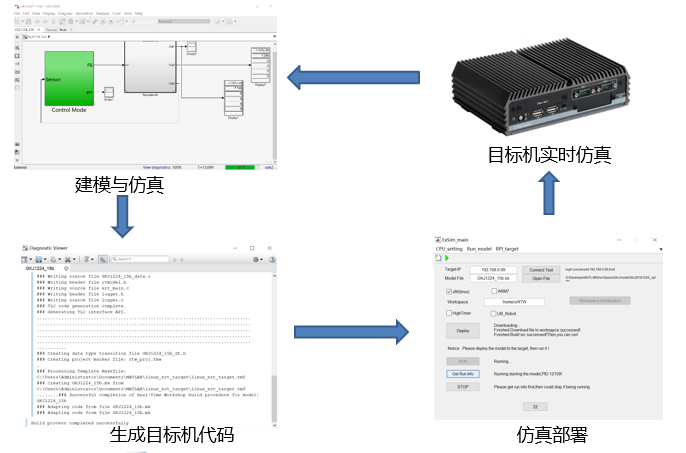
l 開發(fā)流程
1. 數(shù)字仿真。在Simulink中建立機器人控制模型,初步驗證模型及算法;
2. 半實物模型準備。對數(shù)字仿真模型進行修改,建立半實物仿真模型;
3. 目標代碼自動生成。將Simulink模型轉(zhuǎn)化為C代碼,并最終編譯為可執(zhí)行程序;
4. 仿真配置管理。配置仿真目標機屬性;
5. 實時仿真。連接目標機成功后,啟動實時仿真。可執(zhí)行文件自動運行,與實際機器人系統(tǒng)或HIL交互;開發(fā)工具支持在線調(diào)參,啟停控制,實時數(shù)據(jù)存儲等功能;
6. 仿真數(shù)據(jù)分析處理。
3.視覺單元
視覺軟硬件平臺具有功能豐富、性能穩(wěn)定、操作簡便的優(yōu)勢,能夠滿足視覺定位、測量、檢測和識別等豐富的視覺應用需求。系統(tǒng)自帶千余種圖像處理算子,算法性能優(yōu)秀,具備強大的視覺分析工具庫,可快速構(gòu)建機器視覺應用系統(tǒng),滿足不同的實驗項目和應用需求。

4.總控單元
總控單元配備了西門子S7-1200PLC以及拓展I/0模塊和HMI觸摸屏。其中核心部件PLC(可編程邏輯控制器)為一種具有微處理器的用于自動化控制的數(shù)字運算控制器,可以將控制指令隨時載入內(nèi)存進行儲存與執(zhí)行。可編程控制器由CPU、指令及數(shù)據(jù)內(nèi)存、輸入/輸出接口、電源、數(shù)字模擬轉(zhuǎn)換等功能單元組成。通過HMI可實現(xiàn)對總控系統(tǒng)的快速調(diào)試及控制,大大提高了設備的應用效率及準確性。

5.迷你氣泵盒
相較于傳統(tǒng)供氣方式噪音大、體積大、成本高,此款氣泵盒為客戶提供了一種更便捷、簡單的供氣和使用方式。氣泵盒可以提供-70~110kpa的氣壓范圍,其外觀設計精巧,便于可通過I/O控制接口直接和機器人適配,即插即用,并可適用于日常大多數(shù)的吸盤和柔性夾爪應用場景。

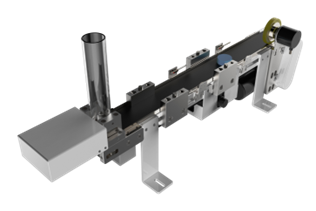
6.供料傳輸單元
主要用于將物料從料倉推送至皮帶線上,以實現(xiàn)物料在不同位置之間的運輸。該傳送帶采用內(nèi)置步進電機,可以準確控制物料的推動距離和速度。通過直流減速電機驅(qū)動,可控制皮帶線的轉(zhuǎn)速,以適應不同物料的運輸需求。此外,該傳送帶還配備了多個對射傳感器和編碼器,可以準確檢測物料在皮帶線上的位置,并實現(xiàn)機器人對物料的空間動態(tài)跟隨和抓取,提高物料的運輸效率和準確性。
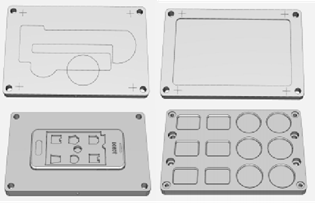
7.快換板單元
實訓臺標配4個快換板模塊,包含:軌跡板、標準視覺載物板、手機模型工件載物板、圓形/矩形工件載物板。配合機器人執(zhí)行單元和視覺單元可完成對實驗對象的視覺識別、檢測、定位,同時實現(xiàn)對物品循跡、定位抓取、碼垛、裝配等工藝應用。實訓臺配置有通用的固定接口,方便根據(jù)客戶定制化需求拓展、增配快換工具板,以滿足更多的實驗場景。
8.工具盒單元
工具盒單元可將實訓臺零配件及工具統(tǒng)一整理收納,定制的內(nèi)襯模具有效地保護好每個配件安全存放,不受運輸?shù)韧饬τ绊憽9ぞ呦鋬?nèi)包含:實驗對象工件、工具、機器人末端轉(zhuǎn)接板、標定針、吸盤、螺絲、接頭備件等。

配套實驗內(nèi)容
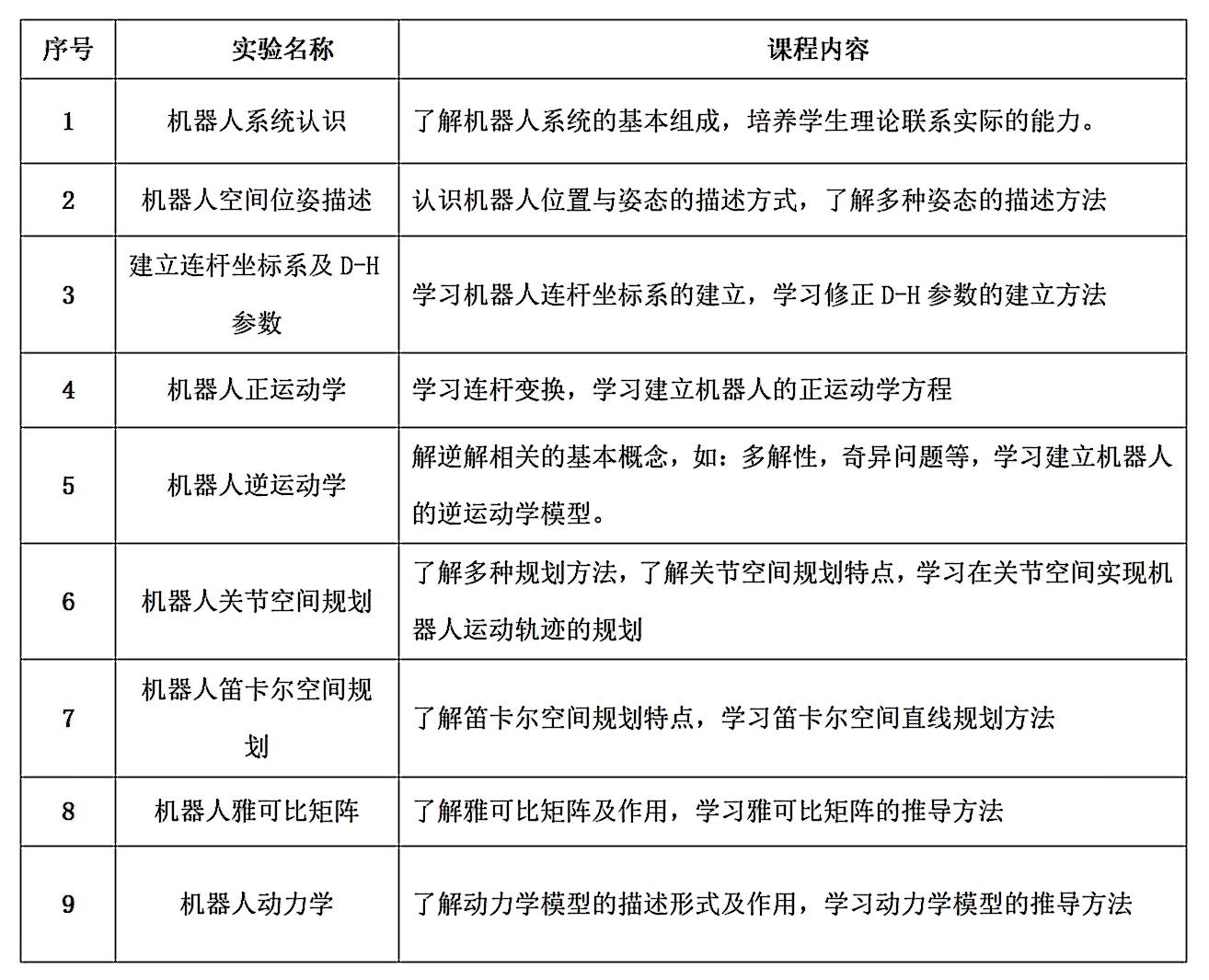
機器人學相關(guān)實驗:
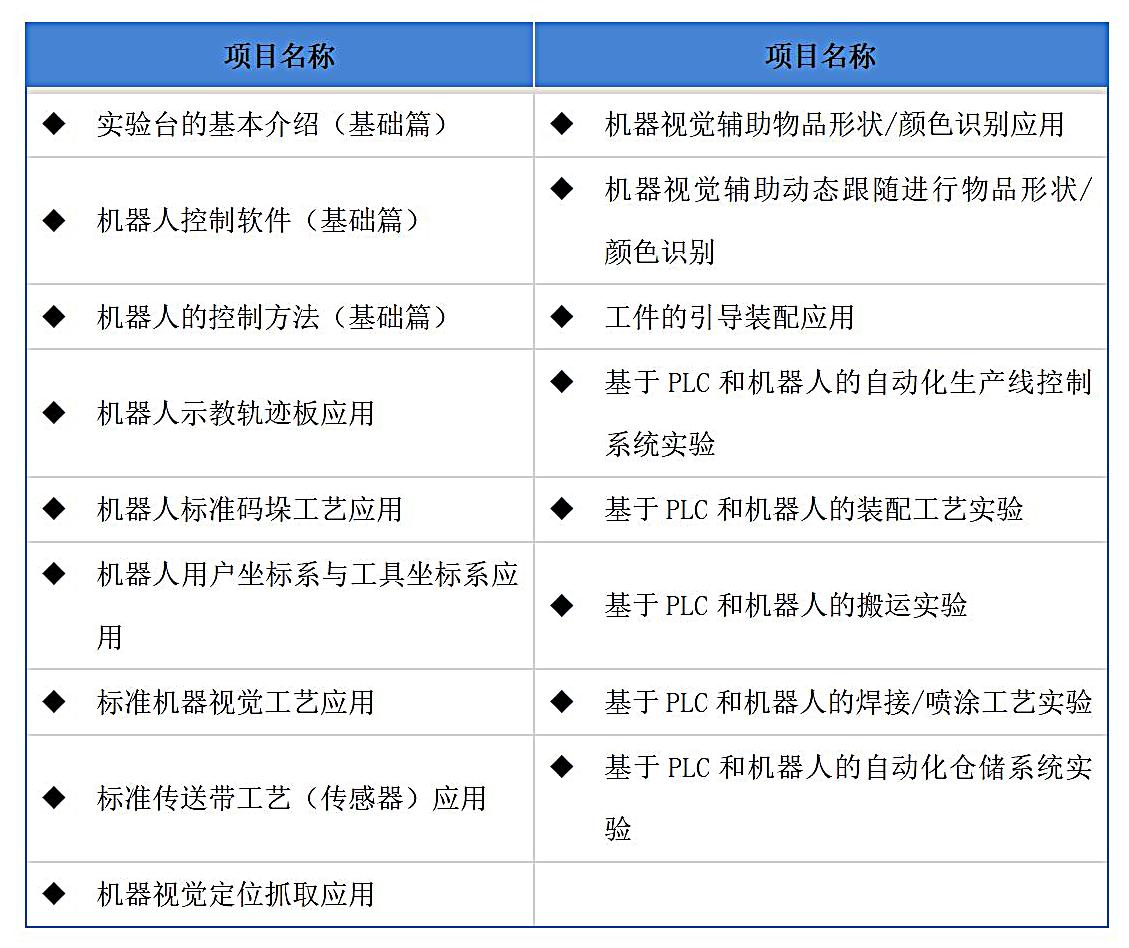
機器人實訓實驗:





客戶服務電話:
027-87018711
 掃描二維碼關(guān)注我們
掃描二維碼關(guān)注我們
聯(lián)系電話:李經(jīng)理 13720126958 陳經(jīng)理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術(shù)開發(fā)區(qū)關(guān)東街道湯遜湖北路36號武漢理工大科技園新能源研發(fā)基地2棟08層801
版權(quán)所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1